Często zadawane pytania
Jaką licencją objęty jest system SARUAV?
Spółka SARUAV sp. z o.o. udziela licencji ograniczonych przestrzennie. Jest to ograniczenie zarówno prawne (warunki licencji), jak i techniczne (do każdego wdrożenia niezbędne jest przygotowanie dedykowanych danych przestrzennych, a automatyczna detekcja ludzi działa w określonym przez klienta obszarze).
Minimalny okres licencji to trzy miesiące, a najdłuższe umowy zawierane są na trzy lata (licencje powiatowe lub wojewódzkie) lub cztery lata (licencje na obszary o powierzchni większej niż powierzchnia jednego województwa). Darmowe licencje testowe obowiązują przez 30 dni.
Od czego zależy cena licencji?
Istnieją dwa rodzaje licencji: standardowe (powiatowe lub wojewódzkie) i niestandardowe (obszary o powierzchni większej niż powierzchnia województwa). Do ustalenia ceny licencji branych jest pod uwagę kilka czynników, m.in. długość umowy licencyjnej, liczba powiatów/województw (dla licencji standardowych) lub powierzchnia obszaru (dla licencji niestandardowych), liczba stanowisk komputerowych, na których zainstalowany ma być system.
Każde wdrożenie niestandardowe wymaga natomiast odrębnej oceny, uwzględniającej również szczególne warunki gwarancji i serwisu.
Jak wygląda proces wdrożenia systemu?
Dla każdego wdrożenia przygotowujemy archiwum, które klient rozpakowuje i na podstawie instrukcji instaluje na swoim komputerze. W przypadku problemów z instalacją systemu pomagamy klientowi w tym procesie, organizując tele- lub wideokonferencję. Każda umowa licencji obejmuje jednorazowe szkolenie w formie zdalnej.
Czy rozwiązanie podlega gwarancji i serwisowi?
Ze względu na to, że wybór oraz zakup drona i komputera pozostają po stronie klienta, w trakcie trwania umowy licencji serwisujemy wyłącznie oprogramowanie opracowane przez spółkę SARUAV sp. z o.o.
Serwis jest regulowany następującym zapisem w umowie licencji:
„W sytuacji awarii aplikacji/systemu SARUAV Licencjobiorca zobowiązuje się powiadomić o tym fakcie Licencjodawcę nie później niż w terminie 7 dni od powzięcia przez siebie informacji o zdarzeniu. W terminie 14 dni od otrzymania powiadomienia Licencjodawca zobowiązuje się przystąpić do usunięcia awarii lub innego zdarzenia (czas reakcji), przy czym warunkiem jest, aby Licencjobiorca dostarczył w tym terminie sprzęt komputerowy do Licencjodawcy w celu usunięcia awarii, chyba że zakres awarii nie wymaga ingerencji w sprzęt komputerowy, na którym zainstalowana będzie aplikacja. Decyzję w tym zakresie podejmuje Licencjodawca po dokonaniu wstępnej analizy zgłoszonego problemu.”.
Jakie parametry musi spełniać komputer do obsługi systemu?
Wymagania komputera są następujące:
| minimalne | zalecane | |
| GPU | NVIDIA Geforce GTX 1660 6GB | NVIDIA Geforce RTX >=6GB VRAM: 2060, 2070, 2080, 3060, 3070, 3080, 4050, 4060, 4070, 4080, 4090 |
| CPU | Intel i5 lub AMD Ryzen 5 |
Intel i7 lub AMD Ryzen 7 |
| RAM | 8GB | 16GB |
| HDD |
w zależności od wielkości wdrożenia (przynajmniej 10GB miejsca na dysku dla terenu wielkości województwa lub 40GB dla terenu Polski) |
|
| SOFTWARE |
Windows 10 aktualne sterowniki karty graficznej + oprogramowanie CUDA Toolkit + biblioteki Microsoft Visual C++ Redistributable |
|
Jakie są rekomendacje dotyczące zamontowanej na dronie kamery, aby detekcja mogła zostać poprawnie przeprowadzona?
Aby detekcja była jak najskuteczniejsza, a estymacja współrzędnych wskazywanych osób jak najdokładniejsza, kamera powinna umożliwiać rejestrację terenu w ujęciu nadirowym, czyli pionowo z góry. Wymagamy, aby zobrazowania lotnicze były zapisywane w formacie JPG. Parametry kamery oraz wysokość lotu powinny być dostosowane do rejestracji obrazu o terenowej wielkości piksela (GSD – ground sampling distance) z przedziału 1,0–2,0 cm/px (najlepiej około 1,3 cm/px). W uproszczeniu oznacza to, że długość jednego boku kwadratowego piksela na zdjęciu odpowiada w terenie odległości 1,0–2,0 cm.
Dla przykładu system działa z kamerami zamontowanymi standardowo w wielowirnikowcach DJI (platformy lub kamery: Phantom 4 Pro/Advanced/Pro V2.0/RTK, Mavic Enterprise, Mavic 2 Enterprise Advanced, Mavic 2 Enterprise Dual, Mavic 2 Zoom, Mavic Air 2, Air 2S, Mavic Pro, Zenmuse Z30/X4S/H20/H20T/X5S/P1), wielowirnikowcach Yuneec (kamery: E90, E90X), wielowirnikowcach Autel (kamery: XT701, XT705, XT709) czy płatowcach eBee (kamera: Canon PowerShot S110). Większość kamer z matrycą 20 Mpx przy locie na wysokości około 45 metrów zapewnia dobrą rozdzielczość zdjęć i GSD na poziomie poniżej 1,5 cm/px.
Jakie są rekomendacje dotyczące realizacji lotów?
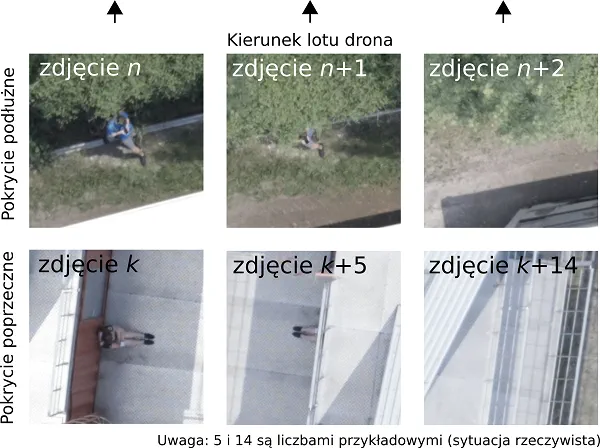
Zdjęcia lotnicze powinny być ujęciami terenu wykonanymi z góry, kamera powinna być skierowana pionowo w dół, a obiektyw ustawiony pionowo w kierunku terenu (zdjęcia nadirowe). Pozyskiwanie zdjęć lotniczych powinno się odbywać zgodnie z rekomendacjami powszechnie przyjętymi w fotogrametrii niskiego pułapu, tj. pokrycie poprzeczne powinno wynosić około 60%, a pokrycie podłużne powinno być ustawione na około 80% (zob. rycina poniżej).
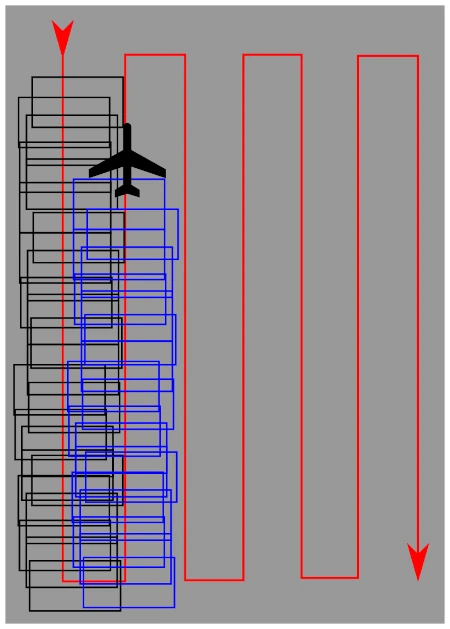
Tak przyjęte pokrycia zapewniają, że każdy punkt jest rejestrowany na kilku zdjęciach, z różnych kierunków i pod różnym kątem (zob. rycina poniżej). Dzięki temu ograniczana jest możliwość przeoczenia osoby. Duże pokrycie nie wpływa znacząco na czas trwania analizy.
Ponadto wysokość przeprowadzonego lotu powinna być dostosowana do parametrów zamontowanej na pokładzie kamery drona, aby pozyskiwane zdjęcia były wysokiej rozdzielczości terenowej, co odpowiada małym wartościom GSD (zob. wyżej).
W celu wykonania zdjęć o jak najlepszej ostrości rekomendujemy, aby prędkość drona w trakcie lotu fotogrametrycznego nie przekraczała 2,5–3,0 m/s.
Czy w systemie możliwa jest detekcja ludzi na podstawie nagrań filmowych?
Nie. Filmy nie są przetwarzane przez system. Do systemu podajemy zbiór nadirowych zobrazowań lotniczych wykonanych zgodnie z powszechnie przyjętymi rekomendacjami w fotogrametrii niskiego pułapu (pokrycie poprzeczne i podłużne na poziomie 60/80%).
Czy system wykorzystuje zdjęcia i filmy z podczerwieni?
Nie. Nasz algorytm detekcji ludzi działa wyłącznie na nadirowych zdjęciach RGB. Prowadzone przez nas testy w bliskiej podczerwieni (NIR) dawały mniej satysfakcjonujące wyniki detekcji.
Nie pracujemy też na zobrazowaniach wykonanych w dalekiej podczerwieni (termowizji).
Czy system działa w nocy?
Nasz algorytm detekcji działa na wysokorozdzielczych zobrazowaniach RGB, a zatem jego zastosowanie do zdjęć wykonanych w nocy stanowi ograniczenie. Jeśli nawet z perspektywy uwarunkowań prawnych możliwe jest wykonanie lotów nocnych, pozyskane podczas takiego lotu zdjęcia są często zbyt niskiej jakości, aby detekcja była możliwa.
Jaki jest tryb przetwarzania danych i czas oczekiwania na wyniki analiz?
Mapy teoretycznego zasięgu przemieszczania się człowieka oraz mapy z automatycznie wskazanymi lokalizacjami obiektów przypominających ludzi tworzone są w czasie rzeczywistym na szybkim laptopie, działającym całkowicie offline, bez dostępu do Internetu.
Detekcja ludzi na zdjęciach możliwa jest po wylądowaniu bezzałogowego statku powietrznego i zgraniu z niego zdjęć na laptop, na którym zainstalowany jest system. Przykładowo detekcja na około 100 zobrazowaniach lotniczych wraz z pełną wizualizacją realizowana jest w 2–3 minuty.
Czy system w sposób automatyczny generuje ścieżki lotu drona?
Nie. Wybór terenu do lotu może się odbywać na podstawie rekomendacji uzyskanych w systemie, jednak ostateczna decyzja o tym, gdzie dron powinien zostać wysłany, spoczywa na osobach odpowiedzialnych za planowanie poszukiwań. To one dysponują odpowiednim doświadczeniem w zakresie zarządzania i są odpowiedzialne za optymalną alokację zasobów w terenie.
Odpowiedzialność za zaplanowanie ścieżek i prawidłowe przeprowadzenie lotu spoczywa na operatorze drona i odbywa się w niezależnych od systemu SARUAV aplikacjach, dedykowanych konkretnym bezzałogowym statkom powietrznym.
Czy jest możliwość, aby system pracował w czasie rzeczywistym?
Domyślny sposób działania modułu detekcji jest następujący: dron wykonuje zdjęcia (system SARUAV nie steruje dronem, a nalot przeprowadza operator), ląduje, wyciągamy kartę lub łączymy drona kablem z laptopem, przegrywamy zdjęcia, uruchamiamy detekcję. W chwili obecnej przetwarzanie zdjęć realizowane jest na laptopie w terenie, na miejscu akcji, całkowicie offline, ale według ww. sposobu (jest to czas zbliżony do rzeczywistego, biorąc pod uwagę czas trwania kolejnych lotów jednego drona).
Jeśli klient posiada drona, który w trakcie lotu przesyła zdjęcia (w dobrej jakości) na komputer, to dość łatwo jesteśmy w stanie przystosować naszą aplikację do działania w takim trybie. Jednak w aktualnej wersji nie jest to wykonalne.
Czy system SARUAV może być dostosowany do wykrywania zwierząt, źródeł pożarów lub innych obiektów?
Takie prace nie były przez nas prowadzone. System detekcji ludzi był opracowywany przez wiele lat i jest rozwijany do dziś. W okresie tym prowadzono zarówno prace koncepcyjne oraz programistyczne, jak i terenowe. Po tak długim okresie badań nasze detektory gwarantują wysoką skuteczność w wykrywaniu ludzi, jednak nie możemy wprost przełożyć ich potencjału na identyfikację innych obiektów.
WSPARCIE
SARUAV sp. z o.o. korzysta ze wsparcia w ramach programu „Wsparcie prawne dla startupów” Polskiej Agencji Rozwoju Przedsiębiorczości, finansowane ze środków budżetu państwa przez Ministerstwo Rozwoju i Technologii (nr umów: UUW-POPP.01.01.00-00-0078/21-00; UUW-POPP.01.01.00-00-0135/22-00).


