IT system for seeking lost persons using drones
Benefits:
- Shorter search time
- Higher efficiency
- Lower costs of search missions
- Lower risk for rescuers
- Does not require Internet access
- Easy and intuitive interface
Features:
- Automatic detection of people in aerial photos
- Precise coordinates of found locations
- Modelling human behaviour
- Planning search mission
The software is fully adapted to existing search procedures


Polish technology developed under the auspices of the University of Wrocław
DIRECT OFFER
Services and organizations interested in using SARUAV to search for missing persons as well as companies wishing to establish commercial cooperation are welcome to contact us by e-mail: info@sarNOSPAMuav.pl.
DISTRIBUTORS

Team
prof. Tomasz Niedzielski
CEO
He is an expert in statistics, time series and processing of aerial imagery acquired by drones
dr Mirosława Jurecka
member of the board
She is an expert in UX research and design, as well as GIS, spatial modelling and map services
dr Bartłomiej Miziński
member of the board
He is an expert in programming, artificial intelligence, image analysis and statistics
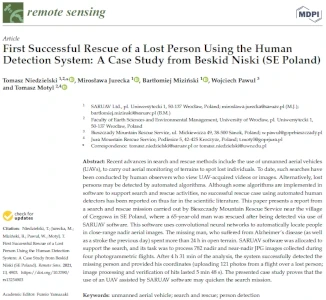
Our research papers

Awards
The SARUAV system has been among laureates of 25th edition of the contest for Polish Product of the Future concluded in 2023 – SARUAV Ltd. together with the University of Wrocław has been awarded in the category of joint product of academic institution and enterprise.
The SARUAV system has won the geoinformation prize for an innovative solution awarded by the Minister of Economic Development and Technology of Poland (photo: MRiT).

They cooperate with us

Implementations of the SARUAV system
Contact
SUPPORT
Award in the contest for Polish Product of the Future for “System SARUAV do detekcji ludzi na zdjęciach lotniczych jako narzędzie wspierające poszukiwanie osób zaginionych” in the amount of 25 000 PLN has been finansed within the activity 2.4.1. POIR “Centrum analiz i pilotaży nowych instrumentów inno_LAB”.
SARUAV Ltd. has been supported in frame of the programme “Wsparcie prawne dla startupów” of Polish Agency for Enterprise Development, finansed from the state budget by the Ministry of Economic Development and Technology of Poland (contract no.: UUW-POPP.01.01.00-00-0078/21-00; UUW-POPP.01.01.00-00-0135/22-00).


